File:Pone.0118903.g001.PNG L.png
Original file (2,917 × 3,225 pixels, file size: 999 KB, MIME type: image/png)
Summary[edit | edit source]
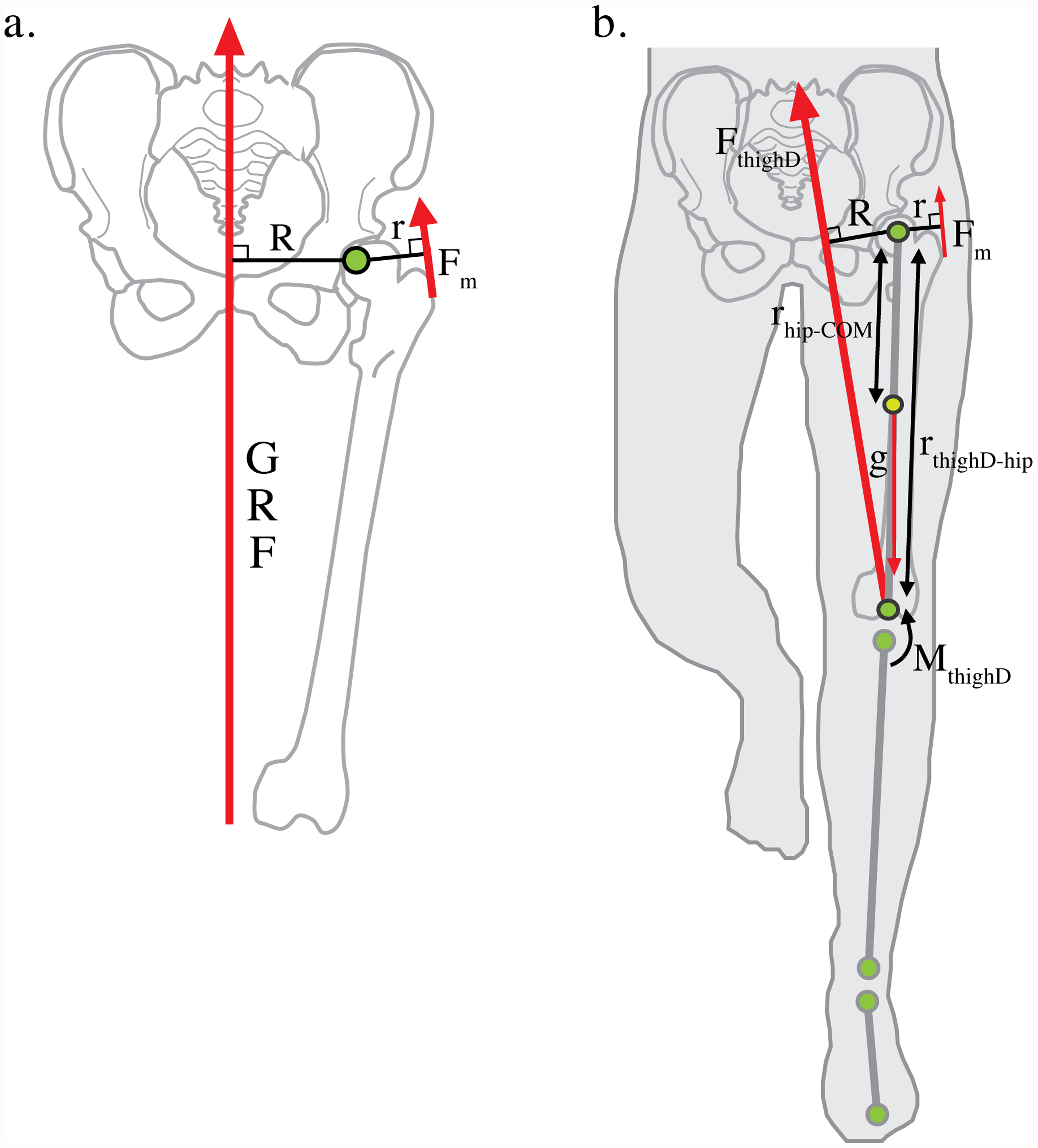
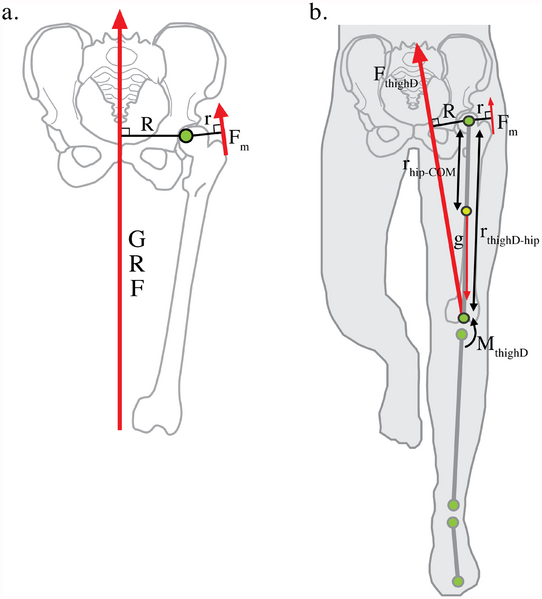
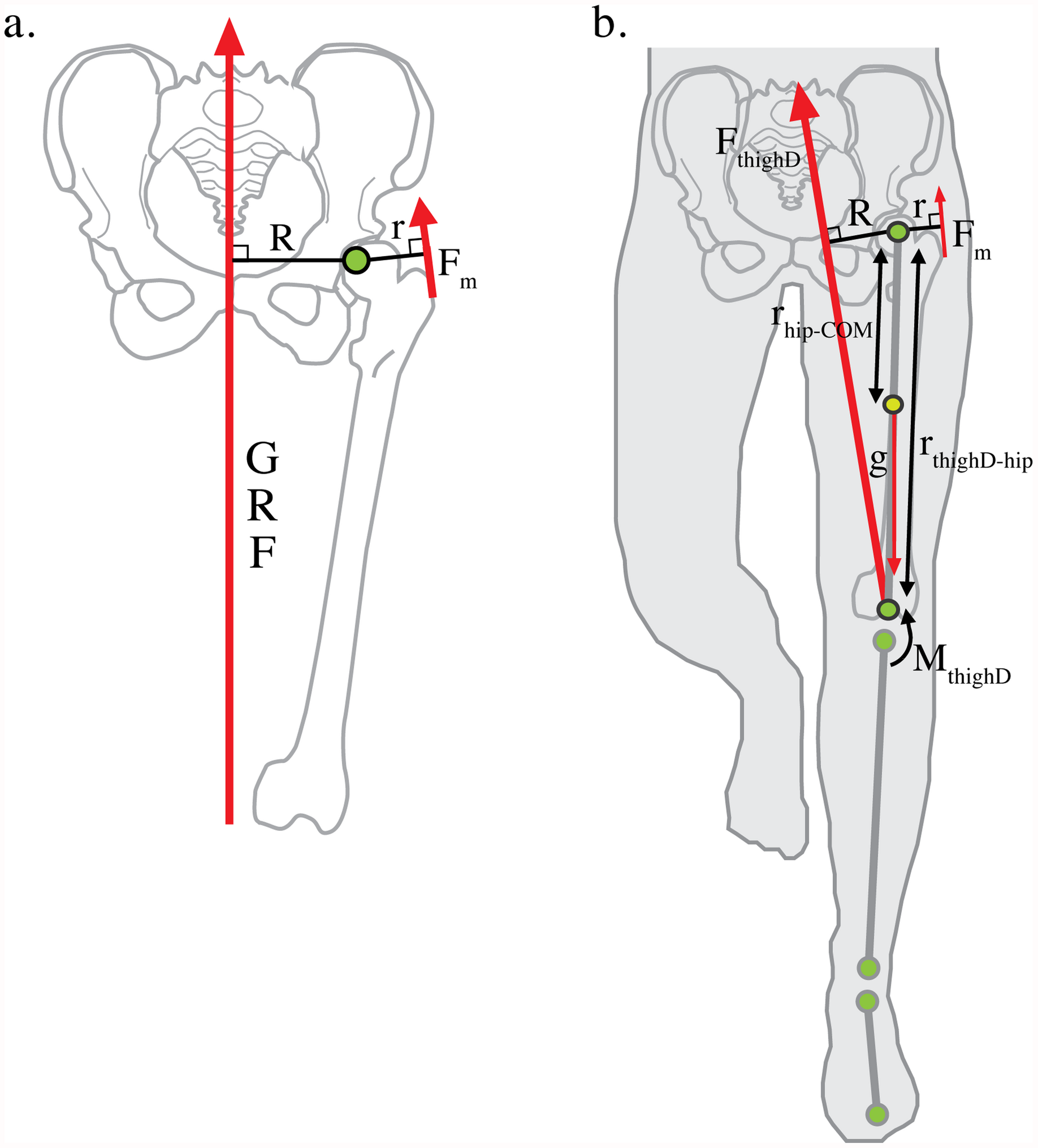
Static and dynamic model of hip abductors force production. The ground reaction force vector (GRF) passes nearly vertically through the body center of mass during locomotion. The effective mechanical advantage (EMA) of the hip abductor muscles is defined as r/R, where r is the abductor muscle moment arm and R is the moment arm of the GRF vector. Hip abductor force (Fm) is equal the multiple of GRF and 1/EMA. A narrow pelvis is thought to reduce locomotor cost by decreasing R and hip abductor force production, but this may increase the likelihood of cephalopelvic disproportion (CPD) by narrowing the maternal birth canal. b. Inverse dynamics models the lower extremity as a series of linked-segments in which the foot, shank and thigh each act as rigid bodies interacting at frictionless joints [23,24]. The net internal hip moment is equal to the thigh moment of inertia times its angular acceleration, minus the distal thigh moment (MthighD), minus the cross-product of the positional vector of hip relative to the thigh center of mass (rhip-COM) and gravity (g), minus the external moment acting on the thigh defined as the cross product of the positional vector of the distal thigh segment relative to the hip (rthighD-hip) and the force vector acting on the distal thigh (FthighD). R can then be measured dynamically as the perpendicular distance from the hip joint center to FthighD (see Methods). If the predictions of the static model and the obstetrical dilemma hold, R measured dynamically will be nearly equal to half- biacetabular width. https://doi.org/10.1371/journal.pone.0118903.g001
Licensing[edit | edit source]
This file is licensed under the Creative Commons Attribution 4.0 Unported license.
You are free to:
- Share - copy and redistribute the material in any medium or format
- Adapt - remix, transform, and build upon the material for any purpose, even commercially.
The licensor cannot revoke these freedoms as long as you follow the license terms.
Under the following conditions:
- Attribution – You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
No additional restrictions — You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 16:37, 27 February 2022 | | 2,917 × 3,225 (999 KB) | Ewa Jaraczewska (talk | contribs) | Static and dynamic model of hip abductors force production. The ground reaction force vector (GRF) passes nearly vertically through the body center of mass during locomotion. The effective mechanical advantage (EMA) of the hip abductor muscles is defined as r/R, where r is the abductor muscle moment arm and R is the moment arm of the GRF vector. Hip abductor force (Fm) is equal the multiple of GRF and 1/EMA. A narrow pelvis is thought to reduce locomotor cost by decreasing R and hip abductor... |
You cannot overwrite this file.
File usage
The following page uses this file:


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}